Vessel structural surveys are stuck in the manual era — dangerous, fragmented, and blind to fleet trends
Certified surveyors still enter confined, hazardous ballast tanks and cargo holds to perform visual close-up inspections and ultrasonic thickness measurements. Each survey starts from scratch: no persistent structural record, no correlation between visual corrosion patterns and quantitative thickness loss, no learning across sister vessels.
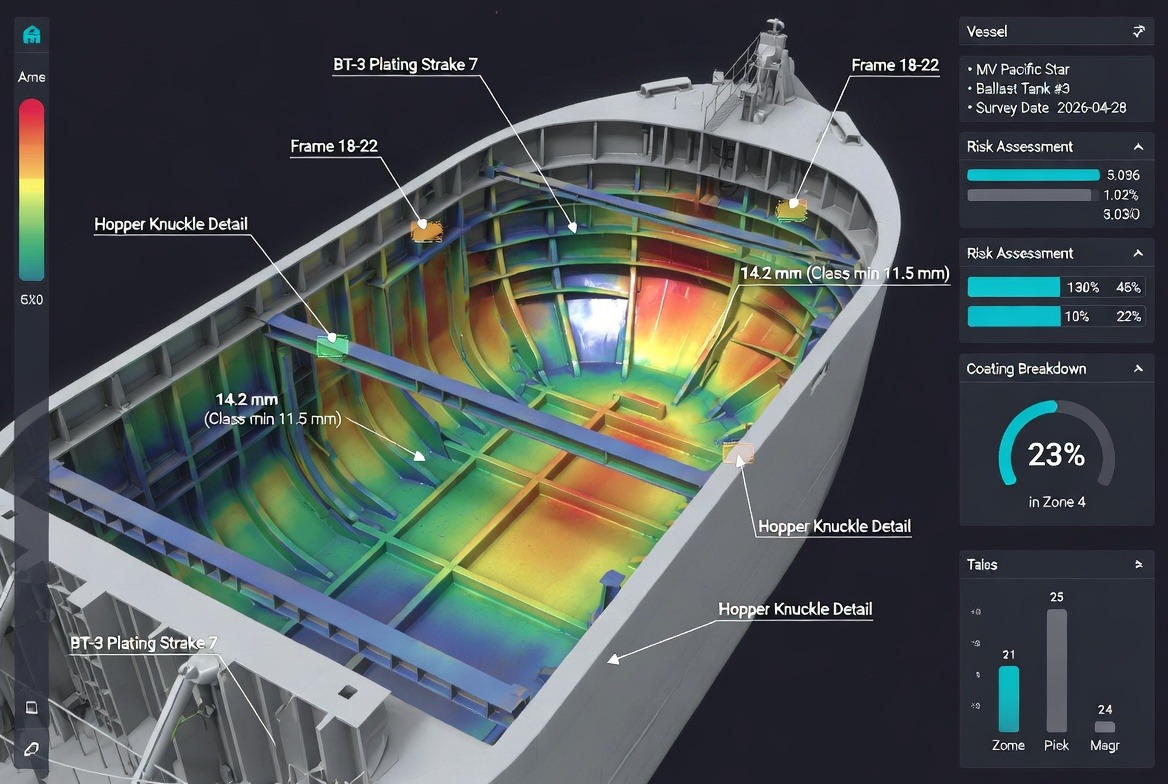
Patterns that span hundreds of vessels — zone-specific corrosion rates by cargo type and operating profile, repeat problem details at manholes and hopper knuckles, coating performance differences — stay hidden because data never leaves individual survey reports and is never registered to a common class structural model.
Manual surveys burn human risk hours, produce fragmented visual + thickness records, and obscure class-level integrity trends. AUTOASSESS Challenge 5 exists to fix exactly this.